
Motor Shield R3 для Ардуино


Артикул:
MSH-R3
Код товара:
00515
Нет в наличии
- Описание
Описание
Motor Shield R3 для Ардуино
Модуль Motor Shield R3 предназначен для управления различными индуктивными нагрузками: одновременно двумя двигателями постоянного тока или одним шаговым, соленоидами, реле, контакторами. Управление происходит по двум каналам мощной коммутации А и В. Модуль ориентирован на работу совместно с Arduino UNO R3. Устройство прекрасно подходит для использования в системах не относящихся к категории Arduino. Motor Shield R3 может встраиваться в различные электромеханические приборы. Позволяет хорошо изучить возможности микросхемы L298.
Простой пример включения 1
Простой пример включения 2
Видео
Применение Motor Shield R3 в платформе на гусеничном ходу.
Управление и контроль
Автоматика прибора, в который входит Motor Shield R3, командует его работой с помощью цифровых логических сигналов: скорость, направления вращения двигателя, тормоз. Установка скорости происходит с помощью широтно-импульсной модуляции (ШИМ). Направление вращения определяет уровень сигнала Direction на соответствующем контакте. Каждый из эти сигналов свой для каналов А и В. Существует возможность контролировать потребляемый ток в каждом канале.
Электроника модуля включает двигатель, соединяя контакты двигателя с питанием и общим проводом. Остановка двигателя происходит когда цепь двигателя разомкнута или оба его контакта соединены с общим проводом, также остановка произойдет если оба контакта соединены с линией питания – ток не протекает. Для контроля уровня каждого контакта моторов предусмотрена светодиодная индикация.
Сигналом тормоз можно пользоваться при установке соответствующей перемычки на обратной стороне платы. Сигнал тормоз останавливает шпиндель двигателя при высоком уровне.
Основные компоненты
Основа модуля – микросхема L298. Она содержит мощные полупроводники, управляющие нагрузкой. Для контроля тока Motor Shield R3 содержит микросхему операционных усилителей LMV358MMX .Сигналы управления поступают на L298 через логические элементы микросхемы 4077d Возле клемм подключения двигателей расположены желтые светодиоды, помогающие определить уровень напряжений на двигателях. Они светятся при подаче высокого уровня на соответствующую линию. Имеется кнопка сброса Arduino и всех модулей, входящих в микроконтроллерную систему. Модуль имеет множество контактов для соединения с Arduino или другими устройствами, установки поверх Motor Shield R3 модулей Arduino, подключения нагрузок и питания.
Соединители, контакты и подключение

По краям платы расположены соединители с множеством контактов. Штыри в нижней части вставляются в соединители Arduino UNO R3.
Модуль использует цифровые контакты Arduino 3, 8, 9, 11, 12, 13 и аналоговые контакты 0 и 1. Разъемы TinkerKit используют:
Интерфейс TWI (I2C) контакты SCL и SDA
ШИМ контакт 6
ШИМ контакт 5
аналоговый вход контакт 2
аналоговый вход контакт 3
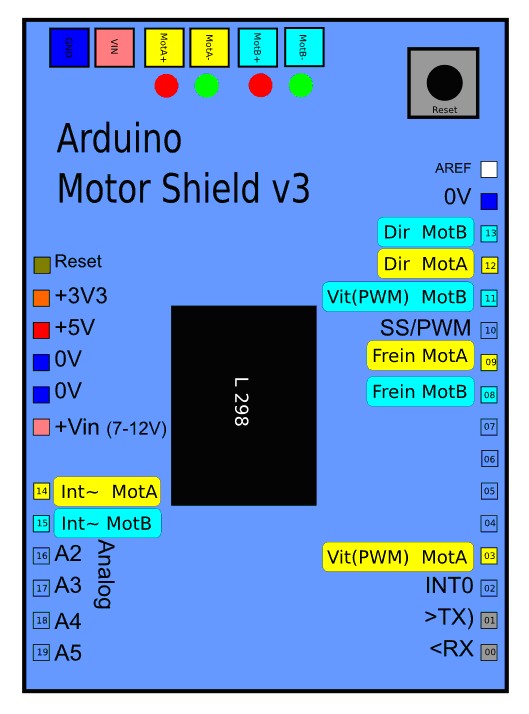
Назначение боковых контактов кроме сигналов TWI.
Сигналы Motor Shield R3 соединены со следующими контактами боковых разъемов:
Модуль Motor Shield R3 предназначен для управления различными индуктивными нагрузками: одновременно двумя двигателями постоянного тока или одним шаговым, соленоидами, реле, контакторами. Управление происходит по двум каналам мощной коммутации А и В. Модуль ориентирован на работу совместно с Arduino UNO R3. Устройство прекрасно подходит для использования в системах не относящихся к категории Arduino. Motor Shield R3 может встраиваться в различные электромеханические приборы. Позволяет хорошо изучить возможности микросхемы L298.
Простой пример включения 1
Простой пример включения 2
Видео
Применение Motor Shield R3 в платформе на гусеничном ходу.
Управление и контроль
Автоматика прибора, в который входит Motor Shield R3, командует его работой с помощью цифровых логических сигналов: скорость, направления вращения двигателя, тормоз. Установка скорости происходит с помощью широтно-импульсной модуляции (ШИМ). Направление вращения определяет уровень сигнала Direction на соответствующем контакте. Каждый из эти сигналов свой для каналов А и В. Существует возможность контролировать потребляемый ток в каждом канале.
Электроника модуля включает двигатель, соединяя контакты двигателя с питанием и общим проводом. Остановка двигателя происходит когда цепь двигателя разомкнута или оба его контакта соединены с общим проводом, также остановка произойдет если оба контакта соединены с линией питания – ток не протекает. Для контроля уровня каждого контакта моторов предусмотрена светодиодная индикация.
Сигналом тормоз можно пользоваться при установке соответствующей перемычки на обратной стороне платы. Сигнал тормоз останавливает шпиндель двигателя при высоком уровне.
Основные компоненты
Основа модуля – микросхема L298. Она содержит мощные полупроводники, управляющие нагрузкой. Для контроля тока Motor Shield R3 содержит микросхему операционных усилителей LMV358MMX .Сигналы управления поступают на L298 через логические элементы микросхемы 4077d Возле клемм подключения двигателей расположены желтые светодиоды, помогающие определить уровень напряжений на двигателях. Они светятся при подаче высокого уровня на соответствующую линию. Имеется кнопка сброса Arduino и всех модулей, входящих в микроконтроллерную систему. Модуль имеет множество контактов для соединения с Arduino или другими устройствами, установки поверх Motor Shield R3 модулей Arduino, подключения нагрузок и питания.
Соединители, контакты и подключение
По краям платы расположены соединители с множеством контактов. Штыри в нижней части вставляются в соединители Arduino UNO R3.
Модуль использует цифровые контакты Arduino 3, 8, 9, 11, 12, 13 и аналоговые контакты 0 и 1. Разъемы TinkerKit используют:
Интерфейс TWI (I2C) контакты SCL и SDA
ШИМ контакт 6
ШИМ контакт 5
аналоговый вход контакт 2
аналоговый вход контакт 3
Назначение боковых контактов кроме сигналов TWI.
Сигналы Motor Shield R3 соединены со следующими контактами боковых разъемов: