Модуль приёмо-передатчика 433 МГц RFM12B-433-D
Артикул:
RFM12B-433
Нет в наличии
- Описание
Описание
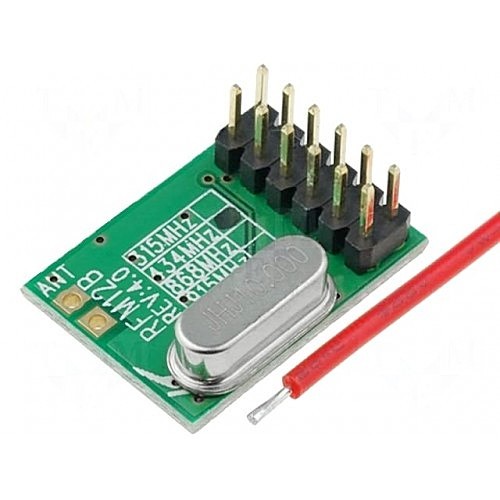
Модуль приёмо-передатчика 433 МГц RFM12B-433-D
Transceiver Radio 433MHz HopeRF RFM12B
RFM12B является отличным вариантом для недорогих беспроводных коммуникаций.
Цифровой приемопередатчик данных по радиоканалу. Применяется для обмена данными между двумя приборами на основе микроконтроллеров. Модуль цифровой радиосвязи имеет проводной интерфейс SPI. Используется FSK модуляция радиосигнала. Применение не требует лицензирования частоты радиосвязи. Разработан ф. Hope Microelectronics (Hope RF). За основу взята микросхема IA4420 немецкой фирмы Silicon Labs. Микросхема имеет синтезатор, блок нулевой промежуточной частоты. Есть таймер пробуждения, детектор разряда батареи, различные автоматические настройки, аналоговый и цифровой измерители уровня принимаемого сигнала, вход сигналов тактирования и сброса, контакт для антенны. Модуль приёмо-перадатчика 433 МГц RFM12B-433-D относится к группе типов модулей с устоявшимся названием RFM12.
Радиомодуль рассчитан на работу в паре с таким же модулем.
Сферы применения: беспроводные телеметрия и управление. Более всего применение модуля уместно при связи с подвижными объектами. Малое потребление позволяет использовать батарейное питание. Также модуль приёмо-перадатчика 433 МГц RFM12B-433-D применяется в следующих областях: автосигнализация, умный дом, различная промышленная автоматика. Для модулей можно установить частоту радиообмена в нескольких диапазонах. Вот некоторые их них со следующим шагом частот:
430,24 – 439,7575 MГц, шаг 2,5 кГц
900,72 – 929,2725 MГц, шаг 7,5 кГц
Характеристики RFM12B-433-D
Питание
Transceiver Radio 433MHz HopeRF RFM12B
RFM12B является отличным вариантом для недорогих беспроводных коммуникаций.
Цифровой приемопередатчик данных по радиоканалу. Применяется для обмена данными между двумя приборами на основе микроконтроллеров. Модуль цифровой радиосвязи имеет проводной интерфейс SPI. Используется FSK модуляция радиосигнала. Применение не требует лицензирования частоты радиосвязи. Разработан ф. Hope Microelectronics (Hope RF). За основу взята микросхема IA4420 немецкой фирмы Silicon Labs. Микросхема имеет синтезатор, блок нулевой промежуточной частоты. Есть таймер пробуждения, детектор разряда батареи, различные автоматические настройки, аналоговый и цифровой измерители уровня принимаемого сигнала, вход сигналов тактирования и сброса, контакт для антенны. Модуль приёмо-перадатчика 433 МГц RFM12B-433-D относится к группе типов модулей с устоявшимся названием RFM12.
Радиомодуль рассчитан на работу в паре с таким же модулем.
Сферы применения: беспроводные телеметрия и управление. Более всего применение модуля уместно при связи с подвижными объектами. Малое потребление позволяет использовать батарейное питание. Также модуль приёмо-перадатчика 433 МГц RFM12B-433-D применяется в следующих областях: автосигнализация, умный дом, различная промышленная автоматика. Для модулей можно установить частоту радиообмена в нескольких диапазонах. Вот некоторые их них со следующим шагом частот:
430,24 – 439,7575 MГц, шаг 2,5 кГц
900,72 – 929,2725 MГц, шаг 7,5 кГц
Характеристики RFM12B-433-D
Питание