
Ультразвуковой датчик HC-SR04

Артикул:
HC-SR04
Код товара:
00372
Нет в наличии
- Описание
Описание
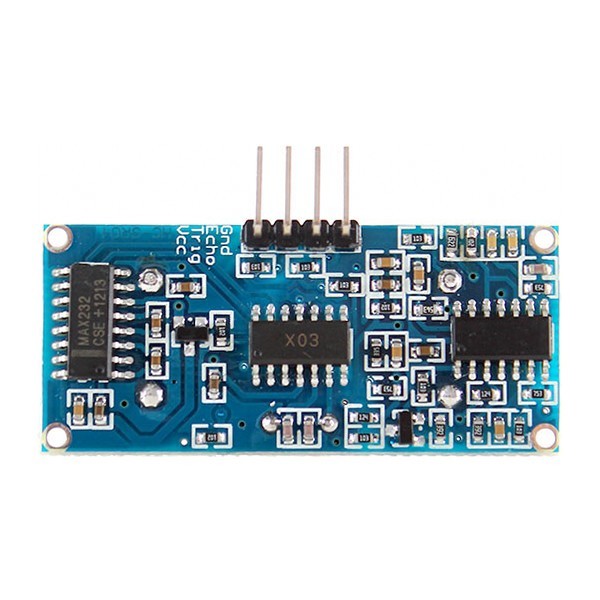
Ультразвуковой датчик HC-SR04
Бесконтактный направленный датчик HC-SR04. Используя ультразвуковые волны, он измеряет расстояние до объекта или просто обнаруживает препятствие на пути движения подвижной конструкции. На плате модуля размещены пьезоизлучатель ультразвука и воспринимающий отраженную волну микрофон. В отличие от инфракрасных дальномеров на ультразвуковой датчик HC-SR04 не влияют источники света или цвет препятствия. Могут возникнуть затруднения при определении расстояния до пушистых или тонких объектов. Обращаем внимание, что скорость звука в воздухе зависит от температуры. Это влияет на точность датчика. Типичными областями применения являются парковочные датчики, контроллеры уровня, устройства мониторинга местности и другие.
Характеристики
Напряжение питания 5 В
Ток потребления в режимах
ожидания до 2 мА
работы 15 мА
Частота ультразвука 40 кГц
Угол обзора 15 градусов
Измеряемое расстояние
от 0,03 до 0,6 м с разрешающей способностью 3 мм
от 0,6 до 5 м погрешность увеличивается

Размеры модуля.
Назначение контактов
VCC – питание.
GND – общий провод.
Trig – цифровой вход для включения измерения.
Echo – после завершения измерения, на этот выход будет подана логическая единица на время, пропорциональное расстоянию до объекта.
Принцип действия

Датчик отправляет ультразвуковые импульсы и слушает эхо.
На вход Trig датчика подаем импульс высокого уровня длительностью 10–15 микросекунд. Датчик отправляет ультразвуковой сигнал "chirp" из восьми коротких импульсов частотой выше предела диапазон слуха человека. Электроника датчика знает скорость звука в воздухе. Измеряя время между отправленным и принятым ультразвуком, ультразвуковой датчик HC-SR04 формирует выходной сигнал. Этот принцип эхолокации используют дельфины и летучие мыши. Спустя примерно микросекунду ультразвуковой датчик HC-SR04 выдает на выходе Echo импульс высокого уровня длительностью до 38 миллисекунд. Если препятствий не обнаружено, то на выходе будет сигнал с длительностью 38 мс. Таким образом, для работы с датчиком от электроники прибора требуется один цифровой управляющий выход и один вход для сигнала датчика.

Длина импульса на выходе Echo пропорциональна расстоянию до препятствия. Расстояние вычисляется по формуле:
S=F/58, где
S – расстояние в сантиметрах,
F – продолжительность импульса в микросекундах.
Для взаимодействия Arduino с датчиком есть программная библиотека Ultrasonic.
Arduino измеряет расстояние
Переключатель S1 используется для выбора единиц измерения расстояния. Транзисторы Q1, Q2, Q3 управляют работой разрядов индикатора. Резисторы R9, R10 и R11 ограничивают ток базы соответствующего транзистора. Резисторы R1–R8 ограничивают ток через соответствующие сегменты. Использован трехразрядный индикатор E1-3056ASR1. 5 В питания могут быть получены из источника ARDUINO.

Текст программы.
[code1]
Несколько слов о программе: Arduino и ультразвуковой датчик HC-SR04 воспринимают сигналы друг друга благодаря функции библиотеки . Библиотека может быть загружена отсюда. Скачайте этот архив, распакуйте его в папку, назовите его NewPing и скопируйте его в папку / Library ...... .Program files / Arduino.

Бесконтактный направленный датчик HC-SR04. Используя ультразвуковые волны, он измеряет расстояние до объекта или просто обнаруживает препятствие на пути движения подвижной конструкции. На плате модуля размещены пьезоизлучатель ультразвука и воспринимающий отраженную волну микрофон. В отличие от инфракрасных дальномеров на ультразвуковой датчик HC-SR04 не влияют источники света или цвет препятствия. Могут возникнуть затруднения при определении расстояния до пушистых или тонких объектов. Обращаем внимание, что скорость звука в воздухе зависит от температуры. Это влияет на точность датчика. Типичными областями применения являются парковочные датчики, контроллеры уровня, устройства мониторинга местности и другие.
Характеристики
Напряжение питания 5 В
Ток потребления в режимах
ожидания до 2 мА
работы 15 мА
Частота ультразвука 40 кГц
Угол обзора 15 градусов
Измеряемое расстояние
от 0,03 до 0,6 м с разрешающей способностью 3 мм
от 0,6 до 5 м погрешность увеличивается
Размеры модуля.
Назначение контактов
VCC – питание.
GND – общий провод.
Trig – цифровой вход для включения измерения.
Echo – после завершения измерения, на этот выход будет подана логическая единица на время, пропорциональное расстоянию до объекта.
Принцип действия
Датчик отправляет ультразвуковые импульсы и слушает эхо.
На вход Trig датчика подаем импульс высокого уровня длительностью 10–15 микросекунд. Датчик отправляет ультразвуковой сигнал "chirp" из восьми коротких импульсов частотой выше предела диапазон слуха человека. Электроника датчика знает скорость звука в воздухе. Измеряя время между отправленным и принятым ультразвуком, ультразвуковой датчик HC-SR04 формирует выходной сигнал. Этот принцип эхолокации используют дельфины и летучие мыши. Спустя примерно микросекунду ультразвуковой датчик HC-SR04 выдает на выходе Echo импульс высокого уровня длительностью до 38 миллисекунд. Если препятствий не обнаружено, то на выходе будет сигнал с длительностью 38 мс. Таким образом, для работы с датчиком от электроники прибора требуется один цифровой управляющий выход и один вход для сигнала датчика.
Длина импульса на выходе Echo пропорциональна расстоянию до препятствия. Расстояние вычисляется по формуле:
S=F/58, где
S – расстояние в сантиметрах,
F – продолжительность импульса в микросекундах.
Для взаимодействия Arduino с датчиком есть программная библиотека Ultrasonic.
Arduino измеряет расстояние
Переключатель S1 используется для выбора единиц измерения расстояния. Транзисторы Q1, Q2, Q3 управляют работой разрядов индикатора. Резисторы R9, R10 и R11 ограничивают ток базы соответствующего транзистора. Резисторы R1–R8 ограничивают ток через соответствующие сегменты. Использован трехразрядный индикатор E1-3056ASR1. 5 В питания могут быть получены из источника ARDUINO.
Текст программы.
[code1]
Несколько слов о программе: Arduino и ультразвуковой датчик HC-SR04 воспринимают сигналы друг друга благодаря функции библиотеки . Библиотека может быть загружена отсюда. Скачайте этот архив, распакуйте его в папку, назовите его NewPing и скопируйте его в папку / Library ...... .Program files / Arduino.
Хорошая статья из журнала "Автоматика и программная инженерия, 2017, №4 (22)" PDF
Домашняя страница
Техническое описание
Программное обеспечение
Рекомендуемые книги



Датчик воды и глубины погружения
Нет в наличии

Создание Умного дома на базе Arduino. Петин В.А
Нет в наличии
