
Датчик расстояния оптоэлектронный. Дальность:40-300мм; аналоговый; 22мА
Артикул:
RS4-30
Код товара:
00447
Нет в наличии
- Описание
- Характеристики
Описание
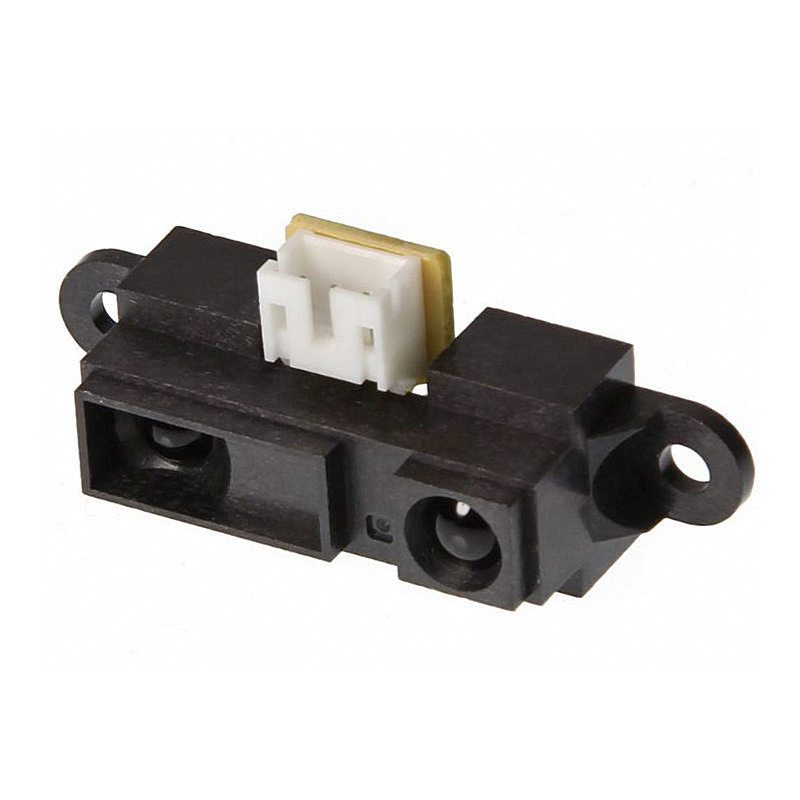
Датчик расстояния оптоэлектронный SHARP GP2Y0A21YK0F Analog Distance Sensor
• Минимальная зависимость от цвета отражающих объектов
• Расстояние обнаружения: 40-300 мм
Бесконтактный датчик для измерения расстояния. Его принцип работы состоит в анализе отраженного инфракрасного излучения светодиода датчика от окружающих предметов. Предназначен для установки в механических приборах для определения расстояния до подвижных деталей конструкции. Оптоэлектронный датчик расстояния Sharp GP2Y0A21YK0F удобно использовать в робототехнических проектах на основе Arduino. Подвижные моторизованные платформы, оснащенные такими датчиками, приобретают примитивный аналог зрения. При упрощенной электрической схеме обработки сигнала это отличный способ предотвратить столкновение с препятствием.
Характеристики
Напряжение питания
Номинальное 4,5…5,5 В
Предельное -0,3…+7 В
Ток потребления – 30 мА
Измеряемое расстояние 0,1–0,8 м
Выходной сигнал – аналоговый
Размеры 29,5 Х 13Х 13,5 мм
Температура окружающего воздуха
во время работы -10…60 ℃
хранения -40…70 ℃
Электроника и конструкция датчика
В пластмассовом корпусе датчика находятся ИК светодиод и приемник, представляющий собой матрицу светочувствительных элементов, закрытых линзой. Корпус имеет два отверстия для винтового крепления. Оптика светодиода создает узкий луч. Электроника датчика Sharp GP2Y0A21YK0F преобразует сигналы матрицы ИК-приемника в один аналоговый сигнал. На корпусе датчика расположена вилка соединителя Japan Solderless Terminal (JST) тип S3B-PH, имеющая 3 контакта.
Подключение
Для подключения датчика расстояния используют жгут из трех проводов. Подключение можно сделать через фирменный жгут 3-Pin Female JST PH-Style Cable имеющий розетку JST. В этом случае цветовая маркировка проводов будет соответствовать сигналам: красный – питание, черный – общий, белый – выходной сигнал.
Если расположить датчик Sharp GP2Y0A21YK0F так, чтобы взгляд падал на соединитель и фотоэлементами от себя, то назначение контактов будет таким.
• Минимальная зависимость от цвета отражающих объектов
• Расстояние обнаружения: 40-300 мм
Бесконтактный датчик для измерения расстояния. Его принцип работы состоит в анализе отраженного инфракрасного излучения светодиода датчика от окружающих предметов. Предназначен для установки в механических приборах для определения расстояния до подвижных деталей конструкции. Оптоэлектронный датчик расстояния Sharp GP2Y0A21YK0F удобно использовать в робототехнических проектах на основе Arduino. Подвижные моторизованные платформы, оснащенные такими датчиками, приобретают примитивный аналог зрения. При упрощенной электрической схеме обработки сигнала это отличный способ предотвратить столкновение с препятствием.
Характеристики
Напряжение питания
Номинальное 4,5…5,5 В
Предельное -0,3…+7 В
Ток потребления – 30 мА
Измеряемое расстояние 0,1–0,8 м
Выходной сигнал – аналоговый
Размеры 29,5 Х 13Х 13,5 мм
Температура окружающего воздуха
во время работы -10…60 ℃
хранения -40…70 ℃
Электроника и конструкция датчика
В пластмассовом корпусе датчика находятся ИК светодиод и приемник, представляющий собой матрицу светочувствительных элементов, закрытых линзой. Корпус имеет два отверстия для винтового крепления. Оптика светодиода создает узкий луч. Электроника датчика Sharp GP2Y0A21YK0F преобразует сигналы матрицы ИК-приемника в один аналоговый сигнал. На корпусе датчика расположена вилка соединителя Japan Solderless Terminal (JST) тип S3B-PH, имеющая 3 контакта.
Подключение
Для подключения датчика расстояния используют жгут из трех проводов. Подключение можно сделать через фирменный жгут 3-Pin Female JST PH-Style Cable имеющий розетку JST. В этом случае цветовая маркировка проводов будет соответствовать сигналам: красный – питание, черный – общий, белый – выходной сигнал.
Если расположить датчик Sharp GP2Y0A21YK0F так, чтобы взгляд падал на соединитель и фотоэлементами от себя, то назначение контактов будет таким.
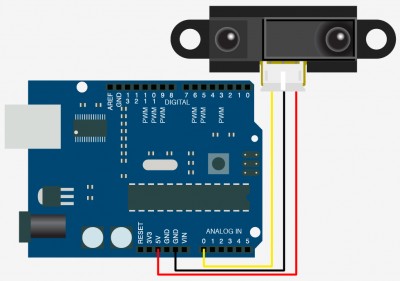
1 - Выходной сигнал
2 - Общий
3 - Питание
Принцип работы
Датчик фиксирует отражение от объекта луча светодиода на удалении не более 0,8 м. Объекты находящиеся дальше датчик расстояния Sharp GP2Y0A21YK0F “не видит”. “Угол зрения” можно представить в виде конуса с диаметром в средней части около 0,16 м. Излучение отражается под углом и возвращается на воспринимающий элемент датчика. Чем дальше объект, тем острее угол. Принцип работы заключается в облучении разных участков матрицы при различных углах отражения. В зависимости от облучаемых участков выходной аналоговый сигнал принимает ту или иную величину.
Нелинейность выходного сигнала
При отсутствии препятствия минимальное напряжение выходного сигнала около 0,5 В. Чем ближе находится препятствие, тем выше напряжение на выходе. При приближении датчика к препятствию на расстояние от 0,8 до 0,4 м напряжение выхода возрастает почти линейно до величины 1,5 В. Дальнейшее сближение вызывает увеличение скорости нарастания напряжения выхода и на расстоянии от 10 см до 4 см возрастает уже от 2,3 до 3,2 В. Здесь сближение на 6 см увеличило выход на 0,9 В. При дальнейшем сближении закономерность нарушается и происходит снижение напряжения выхода.
Обработка данных требует представления их в виде расстояния, а не напряжения выхода. Для точного измерения расстояния обработка должна учитывать закономерность связывающую расстояние и выходной уровень. Программно нелинейность выходного сигнала корректируется с помощью таблицы или путем преобразования значения напряжения в расстояние по формуле. У разных экземпляров Sharp GP2Y0A21YK0F кривая отличается незначительно.
Установка
Если дистанция до объекта меньше 0,1 м данные датчика нельзя обработать, рядом расположенное препятствие покажется далеким. Одному значению выходного напряжения соответствуют два расстояния: очень близкое и далекое. Самый лучший способ избавиться от этого недостатка – установка датчика на расстоянии 10 см и более от переднего края, защищаемого от столкновения. При установке на движущуюся роботизированную платформу, датчик Sharp GP2Y0A21YK0F, защищающий от столкновения при движении вперед, располагается на расстоянии 10 см от переднего края робота, а датчик, для движения назад в 10 см от заднего края.
Для полноты информации датчик можно превратить в радар, сканер. Рекомендуется установка на механический привод, поворачивающий датчик на угол для сканирования окрестностей. Если одновременно с получением данных от датчика знать его угол поворота, то можно выйти на новый уровень прибора “зрения”. Более надежная защита от столкновения потребует применение двух датчиков, направленных перекрестно.
Обработка сигнала
Простейший случай использования датчика в качестве бампера без определения дистанции потребует на выходе датчика электронной схемы порогового элемента или установки компаратора. Схема должна иметь два выходных состояния: логический 0 или 1. При критическом сближении напряжение на выходе датчика возрастает выше пороговой величины и логический уровень на выходе компаратора меняется с единицы на нуль, электродвигатель отключается.
Определение расстояния требует применения микроконтроллера с АЦП “на борту” и разработки программы. Если соблюдать правила установки, изложенные выше, то опорное напряжение АЦП должно быть 2,56 В. Для точного измерения дистанции напряжение питания 5 В датчика Sharp GP2Y0A21YK0F и опорное напряжение АЦП должны поддерживаться с высокой точностью и должны быть очищенными от шумов. АЦП МК оцифровывает аналоговый сигнал, программа обработки забирает полученные данные из регистров АЦП.
Математика и программирование
После оцифровки данных необходимо линеаризовать значения, другими словами превратить кривую зависимости напряжение/расстояние в прямую. Практически для этого каждое получаемое значение необходимо преобразовать по формуле. На основании данных преобразование следует проводить по формуле:
V=1/(R+k) где:
V – результат АЦП преобразования,
R – расстояние,
k – константа. Для предыдущей модификации датчика Sharp GP2Y0A21YK0F ее значение 0,42.
Операция деления выпрямляет зависимость. Значение константы может быть применено и для других моделей датчиков. Для хорошей функции преобразования необходимо экспериментальным путем определить константу k. Заключенные в МК математика и программирование состоят в линеаризации характеристики датчика на первом этапе обработки сигнала. Для 10-битного преобразования АЦП после подбора константы для предыдущей модели датчика формула для опорного напряжения 2.56 вольт будет выглядеть так:
R=5222/(V-13)
Здесь 5222 и 13 константы, их лучше уточнить экспериментально.
В программе вычисляется расстояния по полученной формуле.
Техническая документация
Датчик фиксирует отражение от объекта луча светодиода на удалении не более 0,8 м. Объекты находящиеся дальше датчик расстояния Sharp GP2Y0A21YK0F “не видит”. “Угол зрения” можно представить в виде конуса с диаметром в средней части около 0,16 м. Излучение отражается под углом и возвращается на воспринимающий элемент датчика. Чем дальше объект, тем острее угол. Принцип работы заключается в облучении разных участков матрицы при различных углах отражения. В зависимости от облучаемых участков выходной аналоговый сигнал принимает ту или иную величину.
Нелинейность выходного сигнала
При отсутствии препятствия минимальное напряжение выходного сигнала около 0,5 В. Чем ближе находится препятствие, тем выше напряжение на выходе. При приближении датчика к препятствию на расстояние от 0,8 до 0,4 м напряжение выхода возрастает почти линейно до величины 1,5 В. Дальнейшее сближение вызывает увеличение скорости нарастания напряжения выхода и на расстоянии от 10 см до 4 см возрастает уже от 2,3 до 3,2 В. Здесь сближение на 6 см увеличило выход на 0,9 В. При дальнейшем сближении закономерность нарушается и происходит снижение напряжения выхода.
Обработка данных требует представления их в виде расстояния, а не напряжения выхода. Для точного измерения расстояния обработка должна учитывать закономерность связывающую расстояние и выходной уровень. Программно нелинейность выходного сигнала корректируется с помощью таблицы или путем преобразования значения напряжения в расстояние по формуле. У разных экземпляров Sharp GP2Y0A21YK0F кривая отличается незначительно.
Установка
Если дистанция до объекта меньше 0,1 м данные датчика нельзя обработать, рядом расположенное препятствие покажется далеким. Одному значению выходного напряжения соответствуют два расстояния: очень близкое и далекое. Самый лучший способ избавиться от этого недостатка – установка датчика на расстоянии 10 см и более от переднего края, защищаемого от столкновения. При установке на движущуюся роботизированную платформу, датчик Sharp GP2Y0A21YK0F, защищающий от столкновения при движении вперед, располагается на расстоянии 10 см от переднего края робота, а датчик, для движения назад в 10 см от заднего края.
Для полноты информации датчик можно превратить в радар, сканер. Рекомендуется установка на механический привод, поворачивающий датчик на угол для сканирования окрестностей. Если одновременно с получением данных от датчика знать его угол поворота, то можно выйти на новый уровень прибора “зрения”. Более надежная защита от столкновения потребует применение двух датчиков, направленных перекрестно.
Обработка сигнала
Простейший случай использования датчика в качестве бампера без определения дистанции потребует на выходе датчика электронной схемы порогового элемента или установки компаратора. Схема должна иметь два выходных состояния: логический 0 или 1. При критическом сближении напряжение на выходе датчика возрастает выше пороговой величины и логический уровень на выходе компаратора меняется с единицы на нуль, электродвигатель отключается.
Определение расстояния требует применения микроконтроллера с АЦП “на борту” и разработки программы. Если соблюдать правила установки, изложенные выше, то опорное напряжение АЦП должно быть 2,56 В. Для точного измерения дистанции напряжение питания 5 В датчика Sharp GP2Y0A21YK0F и опорное напряжение АЦП должны поддерживаться с высокой точностью и должны быть очищенными от шумов. АЦП МК оцифровывает аналоговый сигнал, программа обработки забирает полученные данные из регистров АЦП.
Математика и программирование
После оцифровки данных необходимо линеаризовать значения, другими словами превратить кривую зависимости напряжение/расстояние в прямую. Практически для этого каждое получаемое значение необходимо преобразовать по формуле. На основании данных преобразование следует проводить по формуле:
V=1/(R+k) где:
V – результат АЦП преобразования,
R – расстояние,
k – константа. Для предыдущей модификации датчика Sharp GP2Y0A21YK0F ее значение 0,42.
Операция деления выпрямляет зависимость. Значение константы может быть применено и для других моделей датчиков. Для хорошей функции преобразования необходимо экспериментальным путем определить константу k. Заключенные в МК математика и программирование состоят в линеаризации характеристики датчика на первом этапе обработки сигнала. Для 10-битного преобразования АЦП после подбора константы для предыдущей модели датчика формула для опорного напряжения 2.56 вольт будет выглядеть так:
R=5222/(V-13)
Здесь 5222 и 13 константы, их лучше уточнить экспериментально.
В программе вычисляется расстояния по полученной формуле.
Техническая документация
Рекомендуемые книги
Характеристики
Характеристики
Напряжение питания
Номинальное 4,5…5,5 В
Предельное -0,3…+7 В
Ток потребления – 30 мА
Измеряемое расстояние 0,1–0,8 м
Выходной сигнал – аналоговый
Размеры 29,5 Х 13Х 13,5 мм
Температура окружающего воздуха
во время работы -10…60 ℃
хранения -40…70 ℃