
NodeMCU Motor Shield для Wi-Fi модуля ESP8266 ESP-12E
Артикул:
NM-12E
Код товара:
00893
Нет в наличии
- Описание
Описание
NodeMCU Motor Shield для Wi-Fi модуля ESP8266 ESP-12E
Кажется совсем недавно появились платы на основе WI-FI модуля ESP8266, но они уже стали настолько популярными, что многие используют их в своих проектах, как замену платам Arduino. И вот новый этап эволюции – появление плат расширения – шилдов.
Представляем Вашему вниманию NodeMCU Motor Shield for ESP-12E – плата расширения для модулей NodeMCU или ESP12E Dev Kit.
Характеристики:
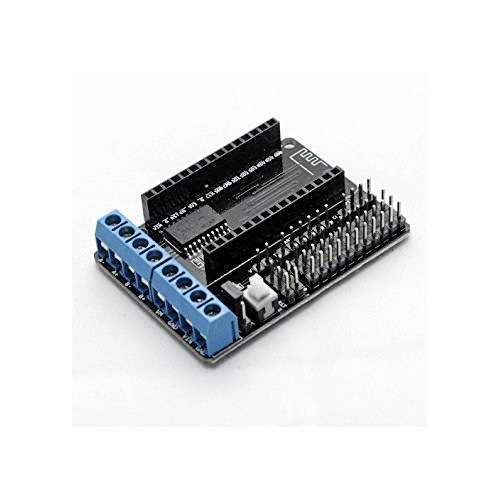
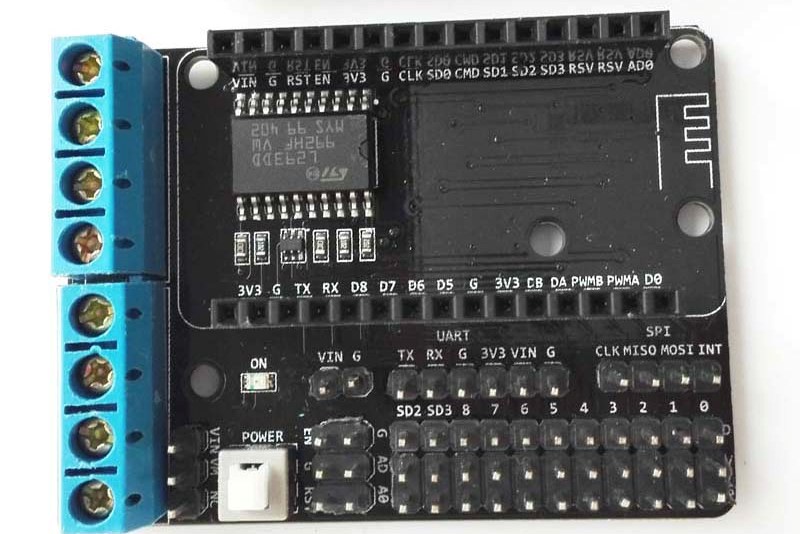
NodeMCU Motor Shield for ESP-12E имеет выведенные на плату разъёмы типа "мама" с шагом 1 дюйм для подключение к ней по модульному принципу плат NodeMCU (или ESP12E Dev Kit), что значительно экономит место.

В качестве драйвера двигателей используется микросхема L293, которая может управлять двумя каналами, что позволяет управлять двумя двигателями постоянного тока или одним шаговым двигателем. Каждый силовой канал рассчитан на нагрузку в 0,6А, и позволяет кратковременную нагрузку не более 1,2 А.
На плате расположены клеммники для подключения двух моторов, питания модуля и питания двигателей. Но возможно и питание от одного источника питания (устанавливается перемычкой shortcut). Cовместное питание не совсем практично, что может вызывать некорректную работу, как подключенных устройств, так и самого микроконтроллера, особенно при максимальных нагрузках. Использовать такое питание лучше только для кратковременной предварительной отладки отдельных силовых узлов. Раздельное питание – правильное решение.
Для управления двигателями используются следующие контакты NodeMCU (ESP12E Dev Kit):
D0 – motor A direction (направление);
D2 – motor B direction (направление);
D5 – motor A speed (скорость PWM);
D4 – motor B speed (скорость PWM).

Отдельно на штыревые выводы выведены GPIO контакты, интерфейсы UART и SPI управляющего модуля (NodeMCU или ESP12E Dev Kit). Причем каждый из GPIO контактов (D0-D7, SD2, SD3) сгруппирован с контактими GND и VCC для удобного подключения разъема сервопривода.
Power switch – кнопка для включения/выключения платы.
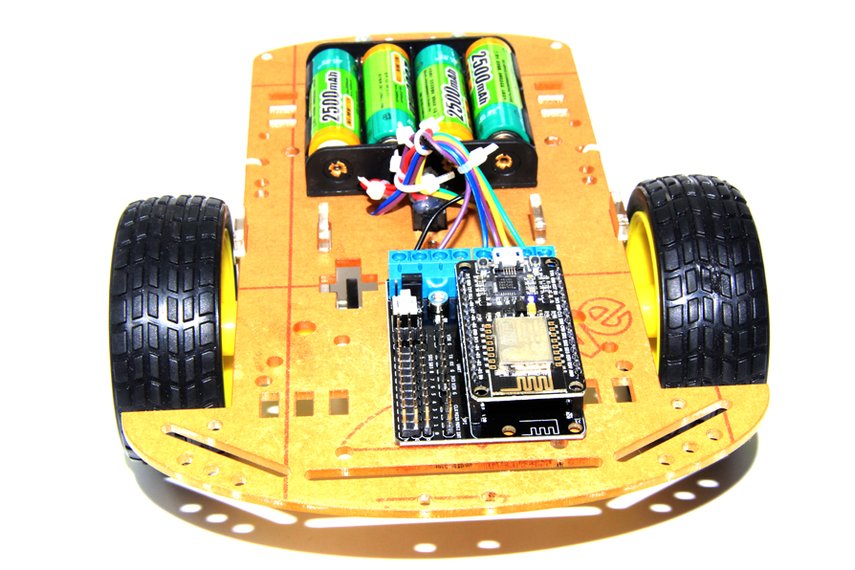
В качестве примера рассмотрим создание Robot Car – машинки, управляемой удаленно по WiFi. Нам потребуются:

В сборе получается так:
Писать скетч будем в Arduino IDE для ESP8266. Загружаем в ESP12E Dev Kit следующий код скачать скетч.
Теперь на планшете открываем браузер и переходим по адресу (возможно у вас свой) http://192.168.1.2 и на странице управляем движением машинки нажатием на соответствующие кнопки на странице.
Кажется совсем недавно появились платы на основе WI-FI модуля ESP8266, но они уже стали настолько популярными, что многие используют их в своих проектах, как замену платам Arduino. И вот новый этап эволюции – появление плат расширения – шилдов.
Представляем Вашему вниманию NodeMCU Motor Shield for ESP-12E – плата расширения для модулей NodeMCU или ESP12E Dev Kit.
Характеристики:
- Микросхема – L293;
- Количество каналов для подключения – 2:
- 2 двигателя постоянного тока;
- 1 шаговый двигатель;
- Напряжения питания логической части – 4.5 – 9 В;
- Напряжения питания силовой части – 4.5 – 36 В;
- Продолжительный максимальный ток нагрузки – 600mА на каждый канал;
- Пиковый максимальный ток – до 1.2A;
- Скорость переключения до 5 kHz;
- Диапазон рабочих температур от -40°C до +150°C;
- Размеры – 42 x 57 x 10 мм;
- Вес – 20 г.
NodeMCU Motor Shield for ESP-12E имеет выведенные на плату разъёмы типа "мама" с шагом 1 дюйм для подключение к ней по модульному принципу плат NodeMCU (или ESP12E Dev Kit), что значительно экономит место.
В качестве драйвера двигателей используется микросхема L293, которая может управлять двумя каналами, что позволяет управлять двумя двигателями постоянного тока или одним шаговым двигателем. Каждый силовой канал рассчитан на нагрузку в 0,6А, и позволяет кратковременную нагрузку не более 1,2 А.
На плате расположены клеммники для подключения двух моторов, питания модуля и питания двигателей. Но возможно и питание от одного источника питания (устанавливается перемычкой shortcut). Cовместное питание не совсем практично, что может вызывать некорректную работу, как подключенных устройств, так и самого микроконтроллера, особенно при максимальных нагрузках. Использовать такое питание лучше только для кратковременной предварительной отладки отдельных силовых узлов. Раздельное питание – правильное решение.
Для управления двигателями используются следующие контакты NodeMCU (ESP12E Dev Kit):
D0 – motor A direction (направление);
D2 – motor B direction (направление);
D5 – motor A speed (скорость PWM);
D4 – motor B speed (скорость PWM).
Отдельно на штыревые выводы выведены GPIO контакты, интерфейсы UART и SPI управляющего модуля (NodeMCU или ESP12E Dev Kit). Причем каждый из GPIO контактов (D0-D7, SD2, SD3) сгруппирован с контактими GND и VCC для удобного подключения разъема сервопривода.
Power switch – кнопка для включения/выключения платы.
В качестве примера рассмотрим создание Robot Car – машинки, управляемой удаленно по WiFi. Нам потребуются:
- NodeMCU Motor Shield;
- ESP12E Dev Kit;
- Набор Kit Smart Car.
В сборе получается так:
Писать скетч будем в Arduino IDE для ESP8266. Загружаем в ESP12E Dev Kit следующий код скачать скетч.
Теперь на планшете открываем браузер и переходим по адресу (возможно у вас свой) http://192.168.1.2 и на странице управляем движением машинки нажатием на соответствующие кнопки на странице.