
RobotBin. Контроллер роботов Vostok-1
Артикул:
RDKT0381
Нет в наличии
- Описание
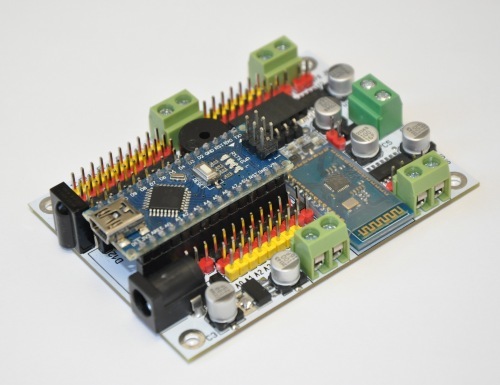
Описание
Контроллер разрабатывался для роботов с питанием от 2-х литиевых элементов.
ПараметрыПитание: от 6 до 10 Вольт.
Оптимальное напряжение: 6.0-8.4 вольта.
При использовании низковольтных моторов есть возможность запитать силовую часть отдельно через клеммы. Драйвер моторов оперирует с напряжением питания от 2.5 до 10 вольт.
Ток, потребляемый схемой (без учёта тока в силовой цепи моторов) - не превышает 80 мА.
На плате установлены две микросхемы драйверов моторов.
Каждая микросхема может управлять 2-мя моторами. Итого: 4 коллекторных мотора. Или 2 шаговых.
Коммутация джамперами позволяет гибко настраивать систему.
Драйверы моторов, как и вся периферия (ИК-фотоприёмник, пищалка, модуль Bluetooth) на плате, может быть гальванически отсоединена от процессора.
Джамперы по цвету относятся к функциональным группам.
Процессор - ATmega328Р. Интерфейс на CH340G.
Выходы и входы микросхем позволяют запараллелить их, и таким образом получать повышенный ток на выходах при питании 2-х моторов.
Драйвера моторов имеют термозащиту от перегрузки.
Максимальный (пиковый) ток 1-го двигателя - 2А
Постоянный рабочий ток - до 1,35 А.
При запараллеливании выводов (режим 2-х моторов):
Максимальный (пиковый) ток двигателя - до 4А
Постоянный рабочий ток - до 2,7 А.
Связь с внешним миром осуществляется:
Программирование - разъём мини-USB
Управление - Bluetooth, ИК-фотоприёмник