
Сервопривод TowerPro SG90


Артикул:
SG90
Код товара:
00404
Нет в наличии
- Описание
Описание
Сервопривод TowerPro SG90
Электромеханический прибор состоящий из мотора постоянного тока, редуктора и управляющей электроники. Выходной вал поворачивается на задаваемый угол 180° – по 90° в каждом направлении.
Работа сервопривода
Широко используется в автомоделях для управления поворотом передних колес, в авиамоделизме для поворота руля и закрылков модели. В эпоху расцвета технического творчества в Советском Союзе за устройством этого класса закрепилось название рулевая машинка.
Управление поворотом передних колес подвижной платформы
Сервопривод Tower Pro SG90 применяется для поворота деталей различных механизмов. Благодаря редуктору на выходном валу развивается усилие достаточное для применения в подвижных роботах. Низкая скорость поворота вала позволяет более точно получить требуемый угол поворота.
Управление сканером препятствий
Электромеханический прибор состоящий из мотора постоянного тока, редуктора и управляющей электроники. Выходной вал поворачивается на задаваемый угол 180° – по 90° в каждом направлении.
Работа сервопривода
Широко используется в автомоделях для управления поворотом передних колес, в авиамоделизме для поворота руля и закрылков модели. В эпоху расцвета технического творчества в Советском Союзе за устройством этого класса закрепилось название рулевая машинка.
Управление поворотом передних колес подвижной платформы
Сервопривод Tower Pro SG90 применяется для поворота деталей различных механизмов. Благодаря редуктору на выходном валу развивается усилие достаточное для применения в подвижных роботах. Низкая скорость поворота вала позволяет более точно получить требуемый угол поворота.
Управление сканером препятствий
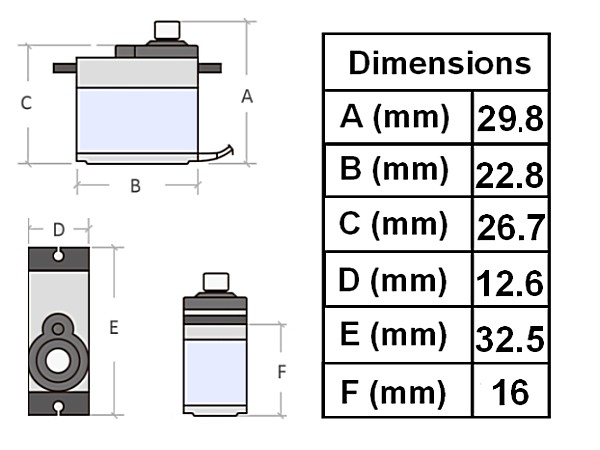
Характеристики
Напряжение
питание 4,5 – 5,5 В
максимальный ток 1 А
Крутящий момент 1,8 килограмм/сантиметр
Температура окружающего воздуха при работе 0 – 55 °С
Длина жгута 230 мм
Материал шестерней нейлон
Назначение проводов жгута
питание 4,5 – 5,5 В
максимальный ток 1 А
Крутящий момент 1,8 килограмм/сантиметр
Температура окружающего воздуха при работе 0 – 55 °С
Длина жгута 230 мм
Материал шестерней нейлон
Назначение проводов жгута
Коричневый или черный – общий
Красный – питание
Желтый или белый – сигнал управления
Управляющая электроника Tower Pro SG90

Внутри корпуса находится небольшой модуль управления, который под действием входного сигнала подает питание соответствующей полярности на электродвигатель. Входной сигнал управления содержит данные о требуемом положении вала. Для определения текущего положения вала редуктор соединен с движком переменного резистора. Электроника Tower Pro SG90 вычисляет разницу между текущим положением редуктора и требуемым. Модуль управления ориентируясь на сопротивление переменного резистора подает питание требуемой полярности на двигатель для поворота редуктора приводящего в соответствие положение передаваемое сигналом управления и текущее.
Информация о требуемом положении вала содержится в скважности импульсов управляющего сигнала. Частота управляющего сигнала должна быть постоянна и составлять 50 Гц. Скважность – отношение длительности импульса к периоду. Чаще при анализе параметров управляющего сигнала рассматривают длительность импульса.
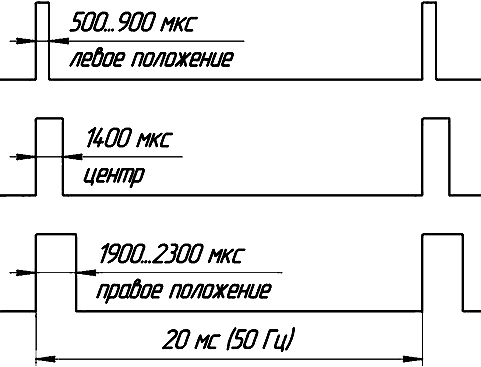
Для формирования такого сигнала удобно использовать микроконтроллер имеющий функцию широтно-импульсной модуляции выходного сигнала.
В эксперименте в качестве ручки управления использован переменный резистор. Оператор управляя им изменяет параметры ШИМ сигнала руководящего работой Tower Pro SG90.
При работе над проектами на базе контроллера Arduino при программировании МК используют специальную программную библиотеку функций Servo.
Робот-паук
Описание сервопривода Tower Pro SG90
Привод ультразвукового локатора