
В этом эксперименте мы познакомимся с акселерометром и гироскопом и будем с помощью Arduino получать показания с этих датчиков.
Необходимые компоненты:
• контроллер Arduino UNO R3;
• плата для прототипирования;
• модуль GY-521;
• провода папа-папа.
Модуль GY-521 на микросхеме MPU6050 содержит гироскоп, акселерометр и температурный сенсор. На плате модуля GY-521 расположена необходимая обвязка MPU6050, в том числе подтягивающие резисторы, стабилизатор напряжения на 3,3 В с малым падением напряжения с фильтрующими конденсаторами. Обмен с микроконтроллером осуществляется по шине I2C.
Гироскоп представляет собой устройство, реагирующее на изменение углов ориентации контролируемого тела. Акселерометр – это устройство, которое измеряет проекцию кажущегося ускорения, то есть разницы между истинным ускорением объекта и гравитационным ускорением.
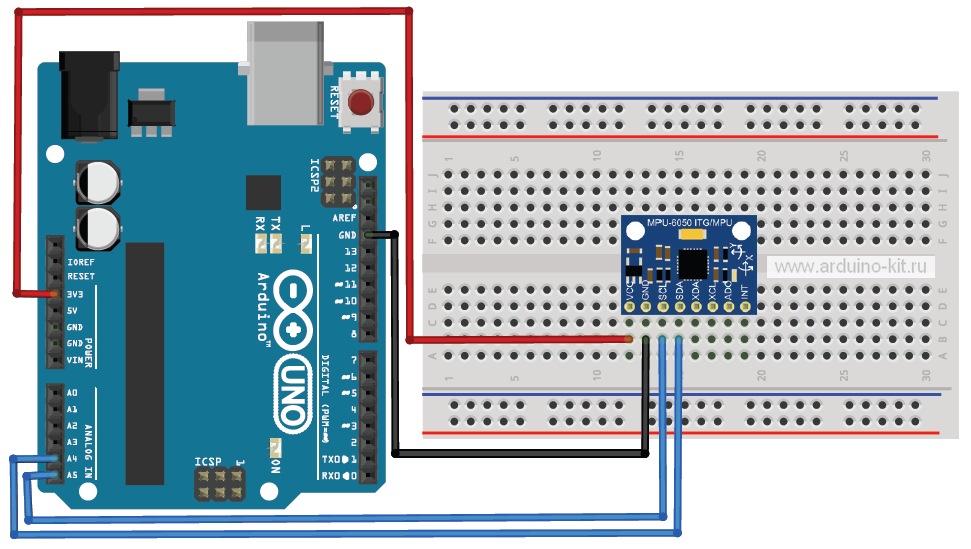
Схема соединений платы GY-521 к Arduino показана на рис. 24.1.
Код простого скетча для считывания значений гироскопа и акселерометра с датчика MPU6050 показан в листинге 24.1.
Порядок подключения:
1. Подключаем плату GY521 к плате Arduino по схеме на рис. 24.1.
2. Загружаем в плату Arduino скетч из листинга 24.1.
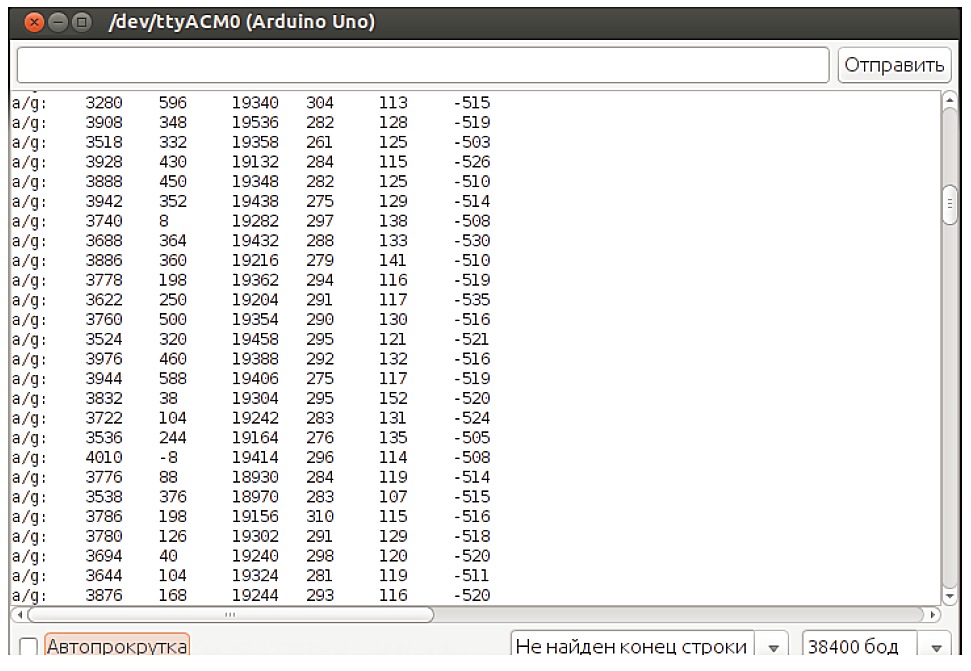
3. Открываем монитор последовательного порта Arduino IDE и смотрим вывод данных гироскопа и акселерометра (см. рис. 24.2).
4. При поворотах датчика данные изменяются.
Область применения таких датчиков достаточно широка. Данный модуль часто применяют для стабилизации полета квадрокоптера по причине совместного использования гироскопа и акселерометра. Кроме этого, модуль можно использовать для координации различных устройств – от просто детектора движения до системы ориентации различных роботов или управления движениями какими-либо устройствами. Область подобных сенсорных устройств достаточно новая и интересная для изучения и применения в любительской технике.
Листинги программ скачать
Необходимые компоненты:
• контроллер Arduino UNO R3;
• плата для прототипирования;
• модуль GY-521;
• провода папа-папа.
Модуль GY-521 на микросхеме MPU6050 содержит гироскоп, акселерометр и температурный сенсор. На плате модуля GY-521 расположена необходимая обвязка MPU6050, в том числе подтягивающие резисторы, стабилизатор напряжения на 3,3 В с малым падением напряжения с фильтрующими конденсаторами. Обмен с микроконтроллером осуществляется по шине I2C.
Гироскоп представляет собой устройство, реагирующее на изменение углов ориентации контролируемого тела. Акселерометр – это устройство, которое измеряет проекцию кажущегося ускорения, то есть разницы между истинным ускорением объекта и гравитационным ускорением.
Схема соединений платы GY-521 к Arduino показана на рис. 24.1.
Рис. 24.1. Схема соединения GY-521 к Arduino
Код простого скетча для считывания значений гироскопа и акселерометра с датчика MPU6050 показан в листинге 24.1.
// подключение библиотек
#include "I2Cdev.h"
#include "MPU6050.h"
#include "Wire.h"
MPU6050 accelgyro;
int16_t ax, ay, az;
int16_t gx, gy, gz;
void setup()
{
}
Wire.begin();
Serial.begin(38400);
// инициализация
Serial.println("Initializing I2C devices...");
accelgyro.initialize();
delay(100);
}
void loop()
{
// чтение значений гироскопа и акселерометра
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
// вывод значений в монитор
Serial.print("a/g:\t");
Serial.print(ax); Serial.print("\t");
Serial.print(ay); Serial.print("\t");
Serial.print(az); Serial.print("\t");
Serial.print(gx); Serial.print("\t");
Serial.print(gy); Serial.print("\t");
Serial.println(gz);
}
Порядок подключения:
1. Подключаем плату GY521 к плате Arduino по схеме на рис. 24.1.
2. Загружаем в плату Arduino скетч из листинга 24.1.
3. Открываем монитор последовательного порта Arduino IDE и смотрим вывод данных гироскопа и акселерометра (см. рис. 24.2).
4. При поворотах датчика данные изменяются.
Рис. 24.2. Вывод данных гироскопа и акселерометра в монитор Arduino IDE
Область применения таких датчиков достаточно широка. Данный модуль часто применяют для стабилизации полета квадрокоптера по причине совместного использования гироскопа и акселерометра. Кроме этого, модуль можно использовать для координации различных устройств – от просто детектора движения до системы ориентации различных роботов или управления движениями какими-либо устройствами. Область подобных сенсорных устройств достаточно новая и интересная для изучения и применения в любительской технике.
Листинги программ скачать